

 |
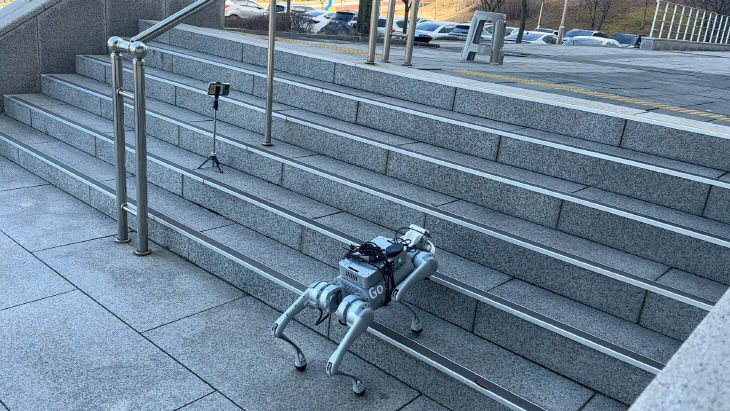
| 한국기술교육대학교(총장 유길상) 컴퓨터공학부 한연희 교수 연구팀이 '깊이 영상(depth image)의 센서 노이즈에 강인한 사족보행 로봇 파쿠르 기술' 개발에 성공했다.(사진=한기대 제공) |
이번 연구의 핵심은 실제 환경에서 발생하는 깊이 영상의 노이즈 영향을 줄여 로봇이 장애물을 안정적으로 통과하도록 한 데 있으며 논문은 는 국제학술대회 'IROS 2026'에 'DAWN'이라는 제목으로 채택됐다.
DAWN은 노이즈가 섞인 영상과 깨끗한 영상을 함께 비교·학습하도록 설계 돼 실제 환경에서도 로봇이 불완전한 영상 정보에 흔들리지 않고 계단·단차 등 주변 지형을 안정적으로 인식할 수 있게 함으로써 로봇의 환경 인식 및 제어 안정성을 높였다.
한연희 교수는 "이번 연구는 학생 연구자들이 문제 정의부터 실제 로봇 검증까지 전 과정을 주도해 거둔 성과라는 점에서 더욱 의미가 크다"라며 "불완전한 센서 데이터와 다양한 환경 변화에 대응해야 하는 실환경에서의 로봇 인식 기술의 안정성을 높이는 데 기여할 것으로 기대한다"고 했다.
천안=하재원 기자
중도일보(www.joongdo.co.kr), 무단전재 및 수집, 재배포 금지





